Note
Go to the end to download the full example code.
LTI System Analysis¶
In this example the state-space, transfer function, zero-pole-gain, and magnitude response for an LTI system are derived and visualized.
Signal-flow graph¶
6th-order elliptic low-pass filter
State-space representation¶
ss = sfg.to_ss()
print(ss)
StateSpace (6 states, 1 inputs, 1 outputs)
A = [[ 3.82875342, -7.15331101, 7.94817034, -5.49500754, 2.23261844,
-0.42049185],
[ 1. , 0. , 0. , 0. , 0. ,
0. ],
[ 0. , 1. , 0. , 0. , 0. ,
0. ],
[ 0. , 0. , 1. , 0. , 0. ,
0. ],
[ 0. , 0. , 0. , 1. , 0. ,
0. ],
[ 0. , 0. , 0. , 0. , 1. ,
0. ]],
B = [[1.],
[0.],
[0.],
[0.],
[0.],
[0.]],
C = [[ 0.02905545, -0.03587307, 0.06163527, -0.02446321, 0.01807334,
0.00398727]],
D = [[0.00688044]]
Transfer function¶
tf = sfg.to_tf()
print(tf)
TransferFunction (1 inputs, 1 outputs)
Denominator: [ 1. -3.82875342 7.15331101 -7.94817034 5.49500754 -2.23261844
0.42049185]
in0 Numerator: [0.00688044 0.00271194 0.01334486 0.00694836 0.01334486 0.00271194
0.00688044]
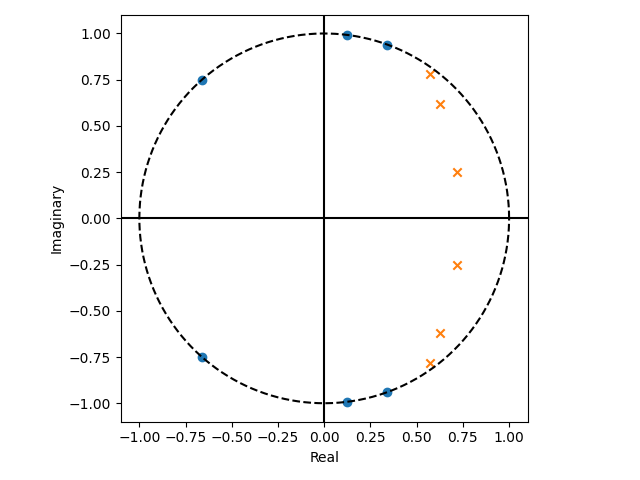
Zero-pole-gain¶
Zeros: [-0.66130483+0.75011727j -0.66130483-0.75011727j 0.34164245+0.93983j
0.34164245-0.93983j 0.12258632+0.99245786j 0.12258632-0.99245786j]
Poles: [0.57014161+0.78145237j 0.57014161-0.78145237j 0.62440867+0.61818949j
0.62440867-0.61818949j 0.71982644+0.25279698j 0.71982644-0.25279698j]
Gain: 0.006880439999999988
Pole-zero plot¶
import numpy as np
import matplotlib.pyplot as plt
theta = np.linspace(0, 2 * np.pi, 1024)
fig, ax = plt.subplots()
ax.plot(np.cos(theta), np.sin(theta), "k--")
ax.scatter(zeros.real, zeros.imag, marker="o")
ax.scatter(poles.real, poles.imag, marker="x")
ax.axhline(0, color="black")
ax.axvline(0, color="black")
ax.set_aspect("equal")
ax.set_xlabel("Real")
ax.set_ylabel("Imaginary")
plt.tight_layout()
plt.show()
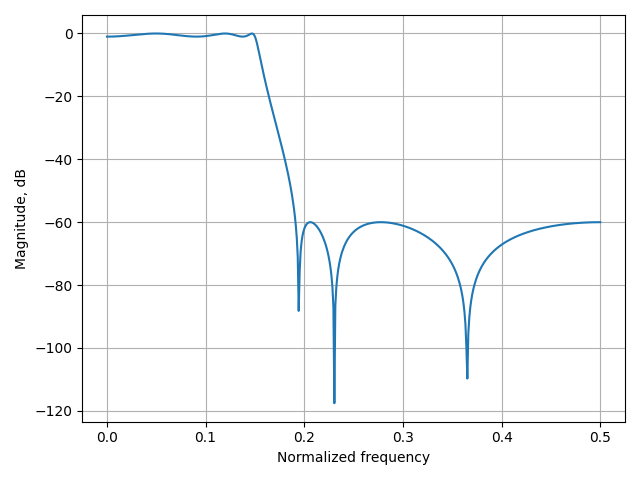
Magnitude response¶
from b_asic.signal_generator import Impulse
from b_asic.simulation import Simulation
sim = Simulation(sfg, [Impulse()])
sim.run_for(1024)
h = np.array(sim.results["out0"])
H = np.fft.rfft(h)
freqs = np.fft.rfftfreq(len(h))
fig, ax = plt.subplots()
ax.plot(freqs, 20 * np.log10(np.abs(H)))
ax.set_xlabel("Normalized frequency")
ax.set_ylabel("Magnitude, dB")
ax.grid(True)
plt.tight_layout()
plt.show()
Total running time of the script: (0 minutes 0.521 seconds)